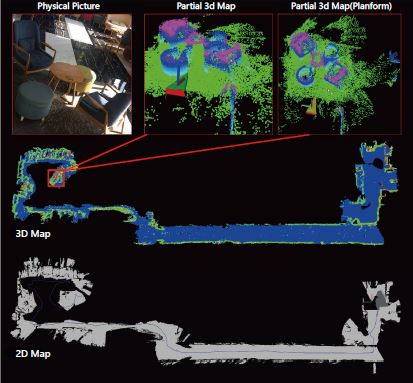
3D Environment Construction
In the process of motion, the robot uses the cameras to obtain the color
and depth information of the environment, and then reconstructs the 3D
spatial information of the object with the help of a specific vision algorithm.
Octomap(probability map) are built by using cameras that detect the
robot's surroundings as it moves provide back obstacle data.
Probability Map
When the robot encounters a dynamic obstacle, it will refresh the current
map data within a certain range, thus discarding the "moving artifact" left
by the dynamic obstacle on the map.
Dynamic Obstacle Perception
During the process of map creation,the global and local real-time positioning
functions are available. The map will follow the camera's perspective
in real time, and support real-time zooming in, zooming out, moving
and arbitrary rotation.
The Global Positioning
The robot can maintain a high loop-back accuracy in a wide range of
fields, a high positioning accuracy within a certain range, and can maintain
stability within a certain oscillation amplitude, with drift or loss.


This product was added to our catalog on Wednesday 08 July, 2020.