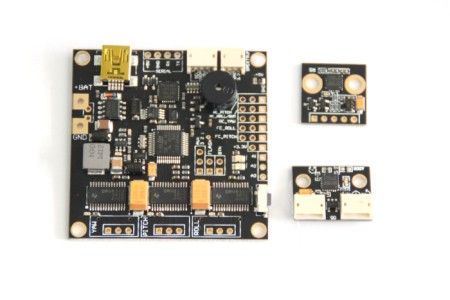
32-bit MCU — ARM Cortex M4. Effectively calculates the complex tasks for 3-axes stabilization Pre-Order! Start Shipping April 8th 2014
Allows camera control with the RC or analog joystick.
Use several switchable profiles for different modes of operation
Supports variety of RC protocols: PWM, Sum-PPM, spektrum and s-bus.
Battery voltage monitoring, compensating voltage drop in the PID-regulator.
Low battery alarm (output to 5V active buzzer).
Increased number of inputs for controlling signals + 3 additional reserved input/output AUX1-AUX3.
Can supply up to 1 amp current for external devices on the 5V power line.
Dedicated UART-socket to connect optional Bluetooth module
Reverse-polarity protection, overheat and overcurrent protection
USB interface for the PC connection, to configure, control and upgrade firmware.
Graphical user interface to manage the settings. Windows / OS X / Linux versions.
Control through the Serial-protocol using dedicated API.
Improved attitude estimation algorythms
Optional second IMU, that will increase the short-term precision of the stabilization 10x-30x times and will make stable work in any frame position.
SPECIFICATIONS
Size of the board: 50×50 mm
Distance between the mounting holes: 45 mm
Diameter of the mounting holes: 3 mm
Power supply voltage: 8–25 V
Maximum motor current: 1,5 A
5V output current to power external devices: up to 1 A
2.56b7
GUI (Windows, OS X, Linux): SimpleBGC_GUI_2_56b7.zip (8Mb 20.01.2016)
User Manual (English): SimpleBGC_32bit_manual_2_5x_eng.pdf (1Mb 24.12.2015)
New hardware- Support of ICM20608 gyroscope+accelerometer sensor.
- New option "I2C high-speed". Use it carefully: high-speed mode may cause I2C errors.
- Support for saving and restoring of calibration data to the IMU's EEPROM (if present).
- Support of analog encoder (rotary position sensor) on YAW axis in the regular firmware.
- New option "Advanced" → "Order of hardware axes" that supports several configurations besides the standard "Camera - PITCH - ROLL - YAW" configuration.
- Support of magnetometer sensor (compass) to prevent drift of gyroscope. Can be combined with the frame IMU or the main IMU.
Control algorithms:
- New setting: "RC" -> "Order of Euler angles" that allows extending the possible trajectories of a camera and the range of working angles.
- Improved the precision of RC control in the "Follow" mode
- New option "Follow" - "Apply an offset correction when an axis is not following."
- New option "Follow" - "Follow rate inside dead-band" to apply very soft control to keep camera always in the center of the dead-band.
Sensors calibration:
- Regular calibration of Accelerometer and gyroscope does not discard the results of temperature calibration but improves it.
- ACC calibration at "normal" Z-top position does not discard the results of 6-point calibration.
- Magnetometer (compass) calibration was significantly improved:
- you do not need a GUI connection (allows to calibrate in the field by menu button);
- an ellipsoid approximation is used;
- New option to skip gyro calibration if gimbal is not fixed well during startup: it allows to start with fresh calibration for best quality, or to start immediately with the previous calibration.
IMU improvements:
- Advanced algorithms for correction of mutual drift in both IMUs.
- "2nd IMU above YAW" position is more reliable now.
- New option "ACC low-pass filter" that helps to improve the stability of the IMU angles. Under dynamic conditions like motion with short lateral accelerations.
Other functionality:
- New adjustable variables GYRO_HEADING_CORRECTION and FRAME_HEADING_ANGLE that helps to manually correct YAW axis drift.
- New option "Advanced" - "Set to the normal position on profile switch".
- Better handling of high-speed control from scripts.
- Improved the range of working angles in 1- and 2-axes systems, making use of 2nd IMU or encoders; all possible 2-axes configurations are supported now.
- New menu command: "Untwist cables".
- New checkbox "Advanced" - "Upside-down PITCH auto-rotation" to turn camera when turning frame upside-down.
- New option "Follow" - "Use frame IMU, if possible" to use 2nd IMU for the "Follow Mode" control, to make it more reliable.
- New menu command: "Center YAW axis" to move a camera to the neutral position by YAW.
- New menu command: "Level Roll, Pitch to the horizon".
- New option "Service" - "Blink profile number" - onboard LED will show currently selected profile.
- Proper handling of "gimbal lock" condition - when YAW and PITCH motor axes are parallel.
- (GUI) New "Emergency stop" option (stop motors in case of the big rate of I2C errors).
- (GUI) Serial-over-UDP connection is supported to configure remote devices via a network (WiFi, Ethernet, Internet).
- Menu button pressed 12 times in series will reset "Serial speed" setting to default value 115200.
- OuterP, OuterI gain increased 5x times.
Encoder-enabled firmware:
- Option to emergency stop if the motor angles reported by the encoder differs a lot from the angle reported by the 2nd IMU.
- Encoder-to-motor gearing ratio can be adjusted.
- In the case of geared setup, the uncertainty of the motor or the frame angle detection at startup can be removed with the help of 2nd IMU.
- Option to enable Briefcase position auto-detection on-the-fly when in "Follow" mode: just hold the camera by hand and turn frame �90 degrees.
- More reliable soft limits; option to enable/disable them for each motor independently.
- Back-EMF compensation is applied at full battery voltage amplitude. It allows getting the maximum speed from the motor (that is limited by the Kv parameter of a motor) even with the low "POWER" setting.
Serial API
- CMD_CONTROL command with the extended format allows specifying different control modes for each axis.
- CMD_AHRS_HELPER command allows accessing internal IMU attitude in DCM form, to use it in the external system or to replace or correct it by the information acquired from the high-grade external IMU.



This product was added to our catalog on Friday 21 March, 2014.