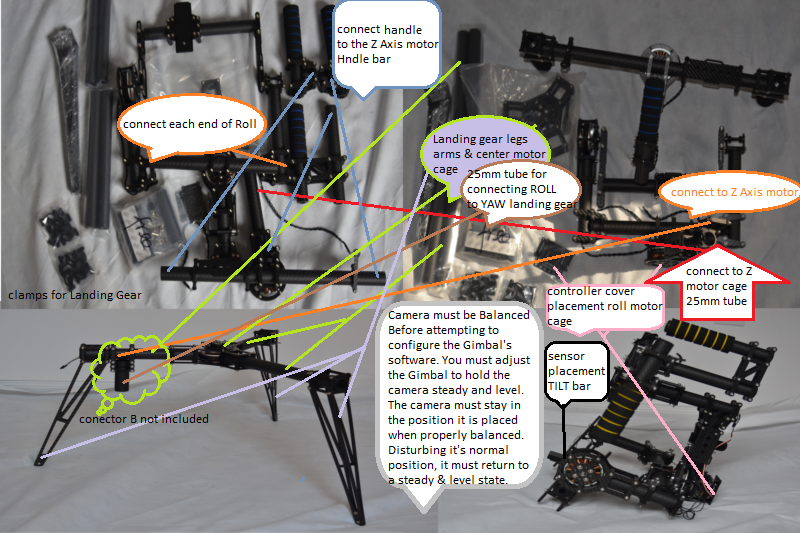
This Gimbal will fit Cinestar, droidworks, hoverfly with no modification
& work with any large multi rotor that will lift 25lb an
more.








GUI (Windows, OS X, Linux): SimpleBGC_GUI_2_42b6.zip (5Mb 16.08.2014)
User Manual (English): SimpleBGC_32bit_manual_2_42_eng.pdf (764Kb 16.08.2014)
Firmware: SimpleBGC_2_40b7.enc.hex (85Kb 7.03.2014)
GUI (Windows, OS X, Linux): SimpleBGC_GUI_2_40b7.zip (5Mb 7.03.2014)


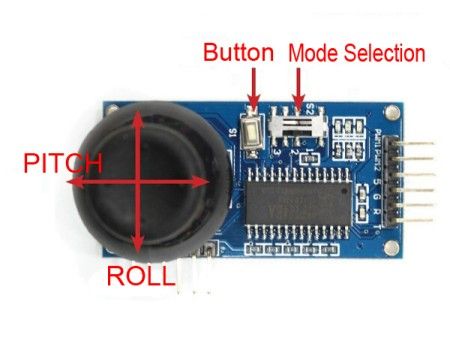
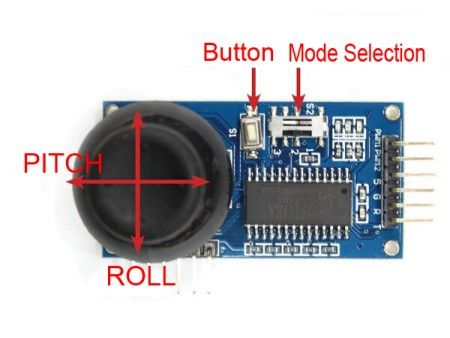
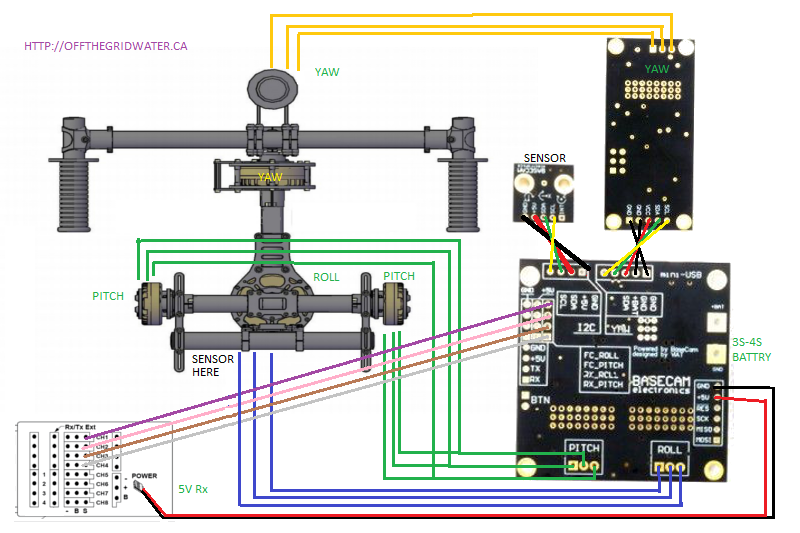
Analog Joystick: PMW1 and PMW2 can be connected with any port from A0~A4. User just needs to set the corresponding interface from firmware.
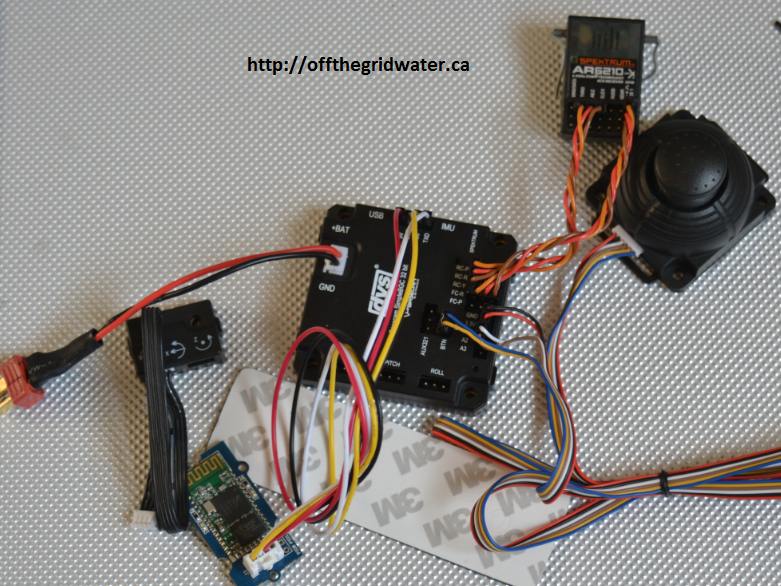
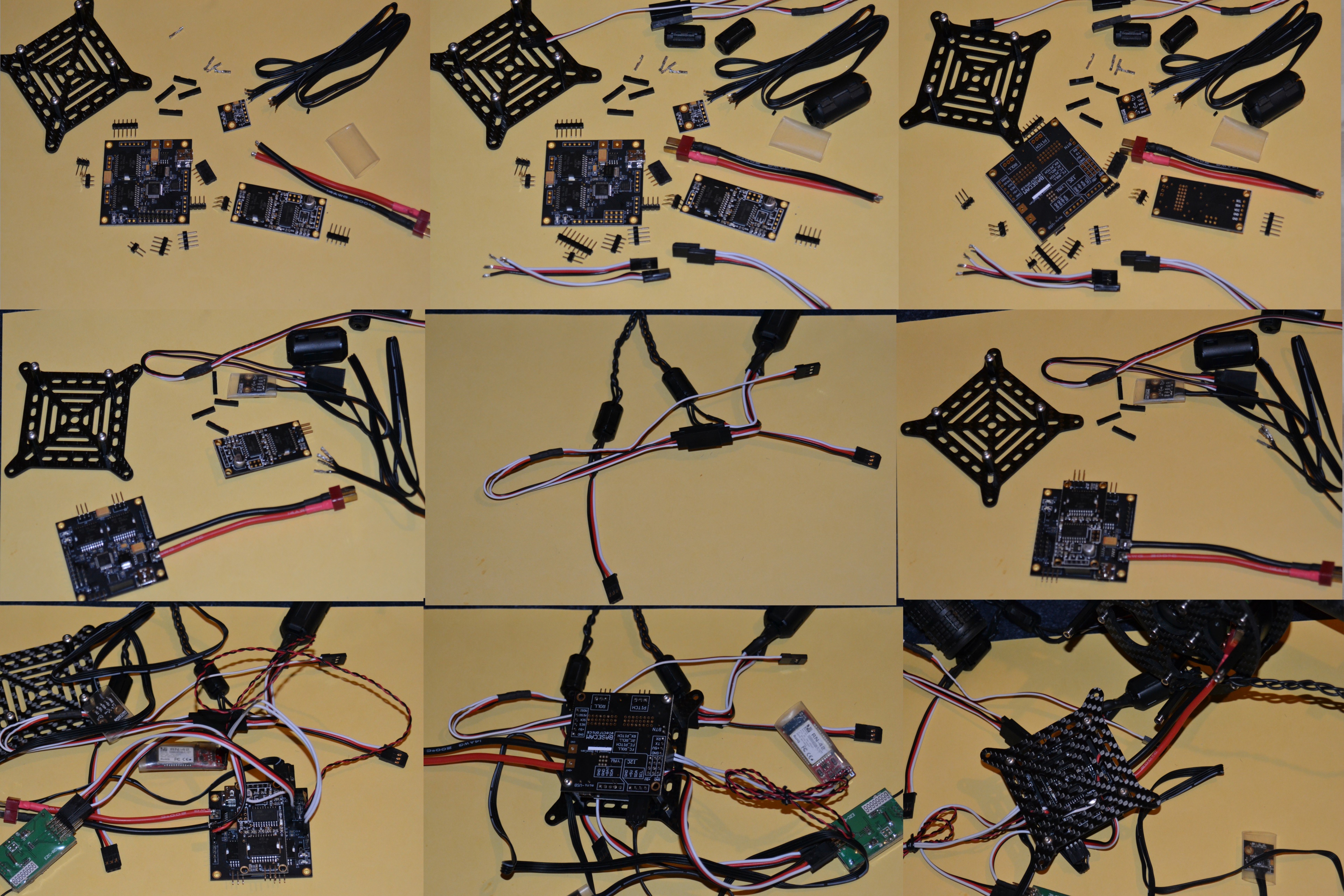
Connect pin define: (main board connected with extension board)
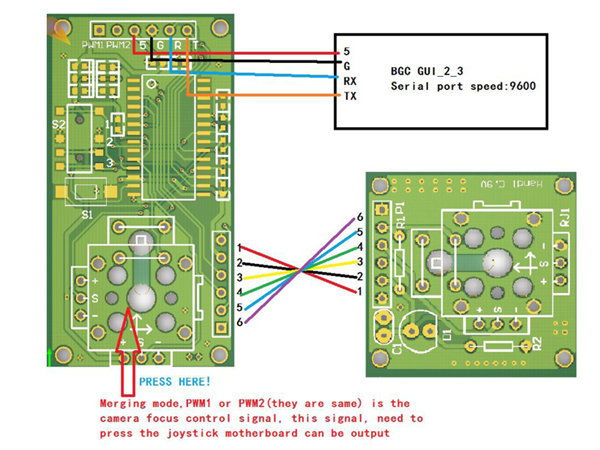
Note:
1. After main board connected with extension board, please connect power again.
2.
After connected with extension board, 3-way switch is not applicable to
control selection. Control gimbal through serial port only. (User needs
to set BUAT rate 9600 through firmware).
3. PMW1 and PMW2 are both
output same signal. Select signal through up-down port of extension
board. Default time 1.5ms high level, adjustable from 1ms~2ms. No output
under normal circumstances unless pressing joystick of main board.
BGC firmware upgrade to 2.3
Upgrade firmware of BGC 2-axis from 2.2 to 2.3. Do nothing with the 3rd axis.
1. Activate SimpleBGC_2_3b5.enc.hex
2. Select FLASH to start installing
3.
Successful installing balloon, connect controller board and set
parameter according to your motor. (The parameter is varied according to
different motors)
4. Connect to remote control, done!
Note:
Before
connecting to controller, turn the 3-way switch to middle. Upgrade
firmware only after connecting to power and blue LED stop flashing.
Recommended operation:
After
adjusting parameter, disconnect power. Connect to controller, and
connect power. After sensor initialization, green LED would stop
flashing and light up, and upgrade.